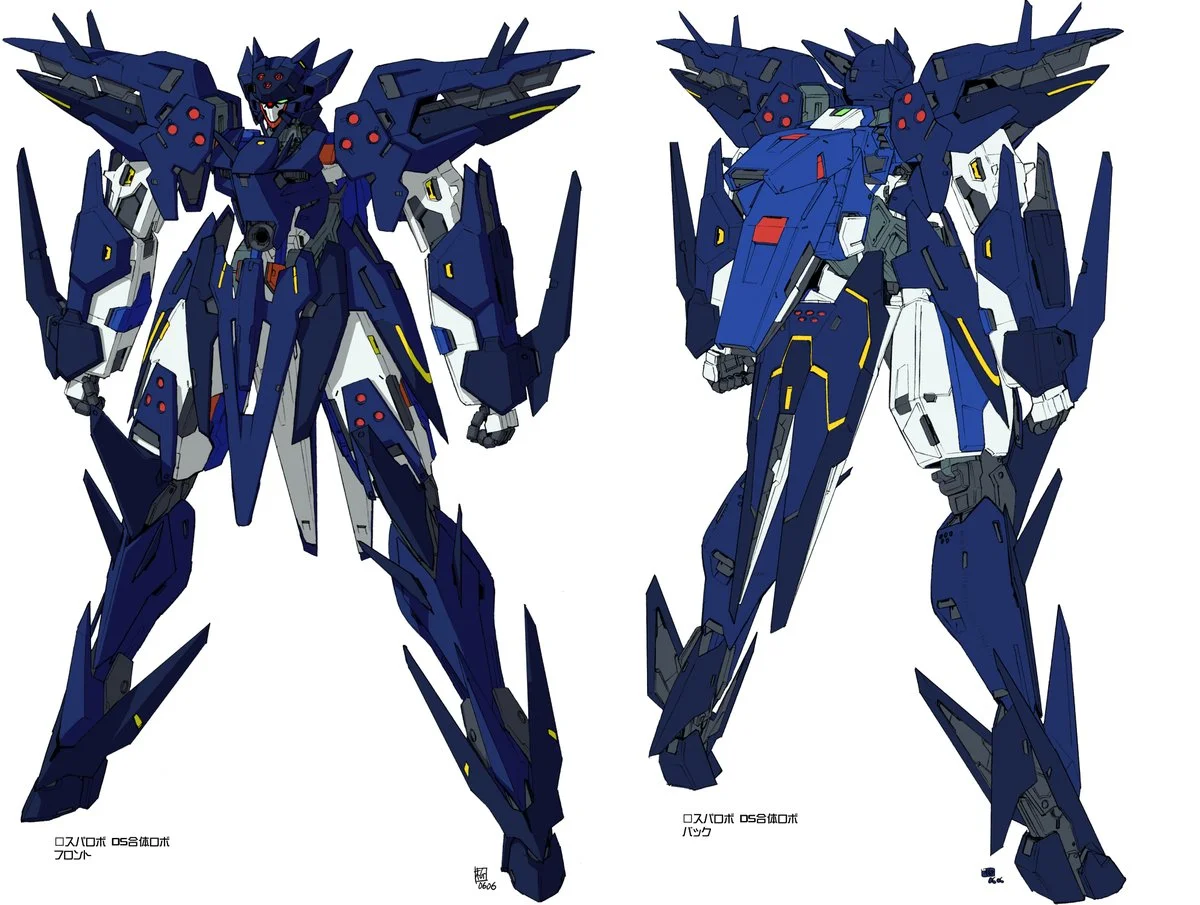
- Height55.4 m
- Weight142.7 t
- Pilotゼンガー・ゾンボルト
參戰超級機器人大戰作品
型號:DGG-XAM1
超軍神(大前卡,ダイゼンガー,DYGENGUAR) 是由前卡・宗博爾特(ゼンガー・ゾンボルト)所駕駛的巨大武者型特機,主要武器為一把巨大的刀「斬艦刀」,以一刀斬擊的戰鬥風格聞名。
古倫加斯特(グルンガスト)系列的後繼開發計畫,用於保衛「地球搖籃」(アースクレイドル)的超動力將軍守護神(Dynamic General Guardian,簡稱 DGG 或 Double G) 系列的四號機之一。本機是系列中的1號機,原本為未完成的機體,存放於特斯拉·萊希研究所(テスラ・ライヒ研究所)。「超軍神」的命名來自前卡本人,名稱取自「Dynamic General Guardian」的簡稱。此外,本機還有「武神裝攻」的別稱,但這個名稱幾乎只有前卡本人使用,然而在《超級機器人大戰 α 系列》中也有一定的認知度。
在《超級機器人大戰 ORIGINAL GENERATION 2》中,超軍神及奧瑟賽達(アウセンザイター,Aussenseiter)被設定為由比安·索達克博士(ビアン·ゾルダーク)專門設計,分別作為前卡・宗博爾特和雷傑爾·法因修梅卡(レーツェル・ファインシュメッカー)的專屬機體。
操縱方式採用了一種名為 DML 系統(Direct Motion Link,直接動作連結) 的技術,實現駕駛員與機體動作的一體化。此外,機體關節的動作傳導使用了人工肌肉,使本機即使擁有巨大的全長與重量,仍展現出難以置信的靈活性。由於系統特性,駕駛艙為立乘式設計,駕駛員以站立方式操作,並以右手握住劍柄狀操縱桿,讓斬擊操作能以自然的感覺進行。此外,與瓦爾西歐妮(ヴァルシオーネ)相似的系統不同,本機的技術已經進步到不再需要特殊的駕駛服,即可直接以普通服裝操作。
本機所搭載的 OS 名為 「JINKI-1(ジンキ-ワン)」,這是一種以自然操作感為核心的系統。與普通 TC-OS 系統(透過行動輸入,OS 再構築動作)相反,「JINKI-1」是透過駕駛員的直接動作,由 OS 預測最終結果並構築出對應動作。然而,由於人類複雜的動作模式,將這些完全反映至機體是一大挑戰。不過,像前卡這樣擁有單純行動模式與思考方式的駕駛員,反而能減少系統誤差,顯得與本機特別契合。JINKI-1 的開發參考了古倫加斯特零式(グルンガスト零式)的戰鬥數據構築而成。在 OG2 的劇情中,由於研究所中的超軍神尚未換裝 JINKI-1,而使用暫時性的 PT 規格 OS,導致機體無法正常運行。
需要注意的是,「JINKI」這個名稱也是「人機一體」的諧音命名。
前卡為右撇子,因此在 DML 系統的影響下,本機理應以右手持刀。然而在《OGS》之前的作品中,超軍神卻常以左手持刀、右手輔助,並直接進行攻擊。從日本劍道的觀點來看,「左手持刀,右手輔助」的方式並非不自然,反而符合武術中的基礎姿勢。
本機與奧瑟賽達均配備了名為「Pf Mode」(プフェールト・モード)的特殊模式。啟動後,奧瑟賽達會變形為馬形態,模仿駕駛員雷傑爾的愛馬「龍卷」(トロンベ),供超軍神騎乘。由於超軍神本身並不具備可變機構,因此推測 Pf Mode 的啟用主要是調整程序以優化乘馬戰鬥。在《OG 系列》與《第3次超級機器人大戰 α》的劇情中,這一功能首次於奧瑟賽達登場場景中確認。